Basic Setup Guide
Table of Content
1. Hardware
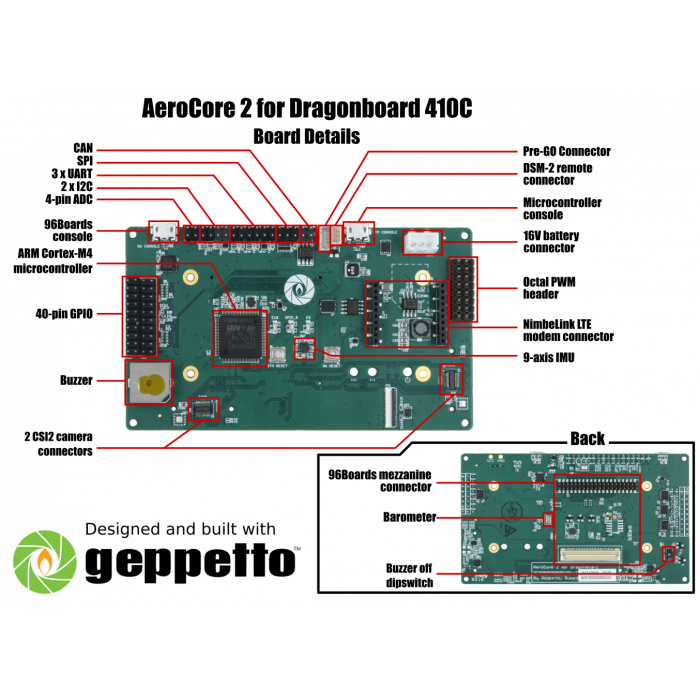
1.1 Hardware Overview
1.2 Hardware Requirements
- 1x Aerocore2 Mezzanine
- 1x Host machine with Ubuntu
- 1x Consumer Edition 96Boards
- 1x Mouse and Keyboard
- 1x HDMI Display
- 1x 12v 2A Power Supply
2 Software Setup
2.1 Building the Firmware
Gumstix has customized the MAVLink PX 4 software suite to the MAV’s standard features and the source code is available online from GitHub at https://github.com/aerocore/Firmware.
Instructions for building the AeroCore 2 PX4 firmware are provided below:
-
- Add dialout permissions to your user:
$ sudo usermod -a -G dialout $USER
- Add dialout permissions to your user:
-
- Remove Modem Manager
$ sudo apt-get remove modemmanager
- Remove Modem Manager
-
- Install dependencies
$ sudo apt-get install python3-serial openocd flex bison libncurses5-dev autoconf texinfo build-essential libftdi-dev libtool zlib1g-dev python-empy
- Install dependencies
-
- Clone the repository and select a branch: master, stable, or beta
$ git clone https://github.com/aerocore/Firmware.git aerocore2_firmware
$ cd aerocore2_firmware && git checkout aerocore2-〈master OR stable OR beta〉
-
- Ensure all submodule repositories are up-to-date
$ git submodule update --init --recursive
- Ensure all submodule repositories are up-to-date
-
- Compile
$ make aerocore2_default
- Compile
2.2 Flashing the Bootloader
It is rarely necessary to flash the AeroCore 2 bootloader as it is shipped pre-flashed. However, if you are having difficulty flashing the firmware to your board, re-flashing the bootloader may resolve the underlying issue. To install the bootloader you will need dfu-util and the boot-loader binaries from Gumstix.
You can download the bootloader at: http://gumstix-misc.s3.amazonaws.com/aerocore2/px4aerocore_bl.bin
Optionally, you can download and compile it from: https://github.com/aerocore/Bootloader/tree/aerocore2. Enter these commands to build the bootloader from source:
$ git clonehttps://github.com/libopencm3/libopencm3.git
$ cd libopencm3 && make
$ cd .. && git clonehttps://github.com/aerocore/Bootloader.git
$ cd Bootloader && make
On a Ubuntu development machine (Windows and Mac OS users check dfu-util documentation):
-
- Install dfu-util
$ sudo apt-get install dfu-util
- Install dfu-util
-
- Download the latest bootloader binary
$ wget http://gumstix-aerocore.s3.amazonaws.com/Bootloader/px4aerocore_bl.bin
- Download the latest bootloader binary
-
- locate the BOOT0 button on the back of the AeroCore 2
-
- While holding down BOOT0, plug the microUSB connector into the USB port labled stm_console or aerocore. Then release BOOT0.
-
- Flash the downloaded bootloader binary to the AeroCore 2
$ sudo dfu-util -a 0 -D px4aerocore_bl.bin -s 0x08000000
- Flash the downloaded bootloader binary to the AeroCore 2
-
- Press the AeroCore 2 reset button. There should be a solid blue Light Emitting Diode(LED)and flashing yellow